

소리, 혈압에서 체중까지... 인간피부를 능가하는 소프트 로봇피부 ‘성큼’
An Ultrasensitive, Visco-Poroelastic Artificial Mechanotransducer Skin Inspired by Piezo2 Protein in Mammalian Merkel Cells

미래창조과학부(장관 최양희)는 포유류의 피부를 구성하는 촉각세포가 외부압력을 감지하는 원리를 구현한 ‘점-유탄성* 고분자 신소재 개발’을 통해, 소리에서부터 혈압, 일반 터치, 다양한 물체의 하중까지 정확하게 감별하는 ‘초고감도, 초저전력, 고신축성 전자피부’를 세계 최초로 개발하였다고 밝혔다.
* 점-유탄성 : 탄성과 점성을 동시에 갖고 있는 구조체 내에 유체가 점성을 갖고 흐르는 성질
앞으로는 초고감도, 초저전력, 고신축성 전자피부가 부착된 차세대 소프트로봇*이 촉각피드백을 통하여 환자의 건강상태를 알려주거나, 정교하고 세밀한 수술을 하는 일 등이 가능해질 전망이다.
* 소프트로봇 : 기존 로봇의 전체 혹은 일부가 유연하고 신축성 있는 구조로 대체되어, 비정형 환경에서 생명체의 이동 및 상호작용의 원리에 기반을 둔 새로운 형태의 로봇

숭실대 연구진(김도환 교수)과 카이스트 연구진(정희태 교수)이 주도한 이번 연구는 미래창조과학부 글로벌프런티어사업(나노기반 소프트일렉트로닉스연구단)과 기초연구사업(개인연구) 지원으로 수행되었다.
연구결과는 재료과학분야 세계적 국제학술지‘어드밴스드 머터리얼즈(Advanced Materials)’ 2017년 30호 표지논문(Inside Front Cover)으로 게재(4월4일)되며, 관련 기술로 1건의 국내특허와 3건의 해외특허를 출원하였다.
논문명과 저자 정보는 다음과 같다.
- 논문명 : An Ultrasensitive, Visco-Poroelastic Artificial Mechanotransducer Skin Inspired by Piezo2 Protein in Mammalian Merkel Cells
-
저자 정보 : 김도환 교수(교신저자, 숭실대), 박상식(공동제1저자, 숭실대),
정희태 교수(교신저자, 카이스트), 김명량(공동제1저자, 카이스트),
정재우 교수(공동저자, 숭실대), 이승걸(공동저자, 부산대),
최덕현 교수(공동저자, 경희대)
논문의 주요 내용은 다음과 같다.
1. 연구의 필요성
최근 이슈가 되고 있는 인간 친화형 웨어러블 전자기기*의 발전과 더불어 지능형 로봇기술이 발전됨에 따라, 사용자를 둘러싼 주변 환경을 실시간으로 인지하고 피드백 정보를 정확하게 제공하는 스마트 인터페이스* 기반의 차세대 지능형 서비스 로봇과 관련된 기반기술의 중요성이 부각되고 있다.
* 웨어러블 전자기기 : 신체에 착용, 부착하여 정보를 입력·출력·처리하는 전자 기기
* 스마트 인터페이스 : 사용자를 둘러싼 주변 환경을 실시간으로 인지하고 피드백 정보를 다양한 형태로 제공하는 접속 장치
그러나 인간의 피부가 수 kPa에서 MPa의 압력까지 인지하는 것과는 대조적으로, 종례의 전자피부는 1kPa 미만의 특정 압력 범위에서만 민감하게 반응 하는 한계를 갖고 있다. 따라서 인간 피부와 같이 넓은 압력구간의 인지와 함께 감지 신뢰성, 고민감도를 겸비한 차세대 전자피부의 구현 기술에 대한 연구가 절실하게 필요한 실정이었다.
2. 연구 내용
연구진이 개발한 전자피부는 최근 2014년도에 규명된 포유류 피부의 대표적인 촉각수용체중의 하나인 메르켈 세포(Merkel Cell)*를 구성하고 있는 Piezo2 단백질*의 압력자극 센싱메커니즘을 직접적으로 모사한 ‘점-유탄성*’이라는 특성을 이용한 것으로,
* 메르켈 세포(Merkel cell) : 포유류 피부에 존재하는 터치를 담당하는 대표적인 상피성 세포
* Piezo2 단백질 : 외부의 물리적 자극에 의해 기계적 변형이 가능한 단백질로써 터치를 담당
* 점-유탄성 : 탄성과 점성을 동시에 갖고 있는 고체 내에 유체가 점성을 갖고 흐르는 성질
연구진은 인간의 피부가 인지하는 터치뿐만 아니라, 소리에서부터 혈압 그리고 물체의 하중에 의해서도 점-유탄성이 유효하게 변화한다는 점에 착안하였다.
연구진은 우선 화학적으로 하드 블록과 소프트 블록으로 구성된 열가소성* 폴리우레탄 고분자를 설계하고, 이온성 액체*와의 혼합을 통해 고투명, 점-유탄성 고분자 박막*을 제조하였고, 이를 기반으로 마이크로크기의 패턴 구조가 도입된 패치형 압전전기용량방식(piezo-capacitive)*의 전기이중층(electric double layer, EDL)* 소자를 제작하였다.
* 열가소성 : 열을 가했을 때 녹고, 온도를 충분히 낮추면 고체 상태로 되돌아가는 성질
* 이온성 액체 : 양이온과 음이온이 크기의 비대칭성으로 인해 결정체를 이루지 못하고 액체 상태로 존재하는 물질
* 박막 : 기계 가공으로 만들 수 없는 두께 1/1,000mm 이하의 막
* 압전전기용량방식 : 압력에 따른 전기용량의 변화를 이용하는 방식
* 전기이중층 : 물체의 얕은 층을 생각할 때 한 면에 양전하, 다른 면에 음전하가 연속적으로 분포되어 있는 것
이 소자는 휘어지고 늘어나는 피부로서의 특성을 가지면서도, 지금까지 보고된 낮은 압력(<1kPa)에서만 민감하게 반응하는 기존 압력센서 기반의 전자피부와는 달리, 하나의 소자가 초저전력(1mV)으로 구동되고, 넓은 압력범위[Pa(기체의 흐름 혹은 소리파동)~MPa(물체의 하중)]의 자극을 정확하게 분별 가능하다.
터치 수준의 제한된 압력범위(kPa~MPa)에서 반응하는 포유류 피부의 촉각 인지능력을 뛰어넘는 인공피부임을 확인시켜준 성과이다.
3. 연구 성과
이번에 개발한 포유류의 촉각원리를 직접적으로 구현한 전자피부 기술은, 넓은 압력범위에서 선형적으로 고민감성이 요구되는 분야에서 기존 기술의 한계를 극복할 수 있는 신규 소재설계의 해법을 촉각세포의 압력감지원리에 대한 체계적인 이해를 바탕으로 제공했다는 점에서 학문적 의의가 크며,
이번 과학적 성과는 차세대 플렉서블 디스플레이용 터치스크린 뿐만 아니라 최근 이슈가 되고 있는 인간 촉각능력 이상을 요구하는 생체진단/치료 및 수술용 소프트 로봇과 같은 보건, 의료 등 헬스케어시스템, 재난·구조, 방위산업 등 다양한 산업분야에 적용이 가능할 것으로 기대된다.

숭실대 김도환 교수는 “이번에 구현한 전자피부 기술은, 넓은 압력범위에서 선형적으로 고민감성이 요구되는 분야에서 기존 기술의 한계를 극복할 수 있는 신규 소재설계의 해법을 촉각세포의 압력감지원리에 대한 체계적인 이해를 바탕으로 제공했다는 점에서 학문적 의의가 크며,
이번에 제안된 과학적 성과는 차세대 플렉서블 디스플레이용 터치스크린뿐만 아니라 최근 이슈가 되고 있는 인간 촉각능력 이상을 요구하는 생체진단/치료 및 수술용 소프트 로봇과 같은 다양한 인간-로봇-환경 촉각인터페이스가 절실히 요구되는 보건, 의료 등 헬스케어시스템, 재난·구조, 방위산업 등 다양한 산업분야에 적용이 가능할 것으로 기대된다”며 연구의의를 밝혔다.
연 구 결 과 문 답
이번 성과가 기존과 다른 점은? (기존 기술과 차이 비교)
본 연구에서는 인간을 포함한 포유류의 피부를 구성하는 촉각세포가 외부압력을 센싱하는 원리를 구현한 ‘점-유탄성 고분자 신소재 개발’을 통해, 소리에서부터 혈압 및 일반 터치, 그리고 더 나아가 다양한 물체의 하중까지도 정확하게 감별하는, 인간의 피부를 뛰어 넘는 ‘초고감도, 초저전력, 고신축성 전자피부’를 개발했다는 점에서 기존 기술과 큰 차별화가 있다.
어디에 쓸 수 있나?(활용 분야 및 제품)
본 연구에서 개발된 전자피부 기술은 차세대 플렉서블 디스플레이용 터치스크린 뿐만 아니라, 최근 이슈가 되고 있는 인간 촉각능력 이상을 요구하는 생체진단/치료 및 수술용 소프트 로봇과 같은 다양한 인간-로봇-환경 촉각인터페이스가 절실히 요구되는 보건, 의료 등 헬스케어시스템, 그리고 더 나아가 재난·구조, 방위산업 등 다양한 산업분야에 적용이 가능할 것으로 기대된다.
실용화를 위한 과제는?
인간의 촉각원리를 생체 모방한 초고감도 전자피부의 실용화를 위해서는, 점-유탄성 고분자 소재 기반의 촉각센서를 외부환경(습도 및 온도)으로부터 보호하고, 외부 압력을 센싱하는 도중에 이온성 액체의 손실을 차단시키기 위한 봉지막 기술이 요구되며, 대면적에서의 센서 직접화와 이에 따른 회로개발이 요구된다.
실용화 가능 시기는?
본 연구에서 제안하는 점-유탄성 이오닉 중합체 박막은 용매에 녹이거나 열로써 녹여서 제조가 가능하기 때문에, 대면적에서전자피부 센서를 직접화하기 위해 기존의 상용화된 프린팅 기술(잉크젯 및 3D 프린팅 기술) 적용이 가능하다. 따라서 대면적 전자피부의 신뢰성 측면을 고려할 때 5년 안에 이루어 질 것으로 판단된다.
산업적, 경제적 파급효과는?
본 연구에서 처음으로 제안한 포유류 촉각원리 모방형 ‘초고감도, 초저전력, 고신축성 전자피부’ 기술은 최근 각광을 받고 있는 4차 산업혁명에서 거론되는 의료/군사용 소프트 로봇 촉각인터페이스의 핵심기술로 큰 부가가치를 창출할 것으로 기대되는 동시에, 독자적인 원천기술 확보로 인해 우리나라 전자피부 분야의 우위를 확보하는데 커다란 기여를 할 수 있을 것으로 전망한다.
용 어 설 명
1. 점/유탄성 (visco-poroelasticity)
○ 탄성과 점성을 동시에 가지는 구조체 내에 유체가 점성을 갖고 흐르는 성질
2. 메르켈 세포 (Merkel cell)
○ 포유류 피부에 존재하는 터치를 담당하는 대표적인 상피성 세포
3. Piezo2 단백질
○ 외부의 물리적 자극에 의해 기계적 변형이 가능한 단백질로써 터치를 담당
4. 열가소성 (thermoplastic)
○ 열을 가했을 때 녹고, 온도를 충분히 낮추면 고체 상태로 되돌아가는 성질
5. 이온성 액체 (ionic liquid)
○ 양이온과 음이온이 크기의 비대칭성으로 인해 결정체를 이루지 못하고 액체 상태로 존재하는 물질
6. 압전전기용량방식 (piezo-capacitive)
○ 압력에 따른 전기용량의 변화를 이용하는 방식
7. 전기이중층 (electric double layer)
○ 물체의 얕은 층을 생각할 때 한 면에 양전하, 다른 면에 음전하가 연속적으로 분포되어 있는 것
8. 스마트 인터페이스 (smart interface)
○ 사용자를 둘러싼 주변 환경을 실시간으로 인지하고 피드백 정보를 다양한 형태로 제공하는 접속 장치
그 림 설 명
그림 1. 인간을 포함한 포유류의 촉각원리를 직접적으로 구현하여 소리에서부터 혈압 및 일반 터치, 그리고 물체의 하중을 인지할 수 있는‘초고감도, 초저전력, 고신축성 전자피부’모식도
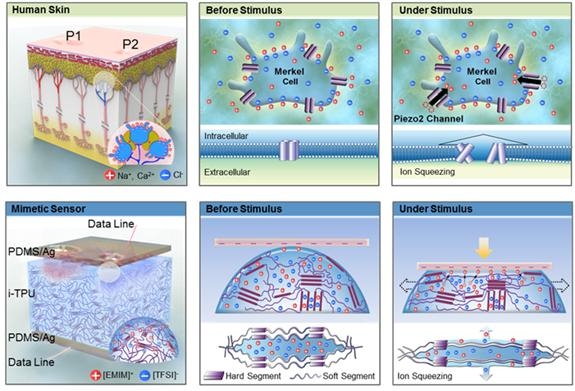
그림 2. 인간을 포함한 포유류 피부의 외부압력 센싱과정(상)과 개발된 생체 모사형 전자피부의 촉각센싱과정(하)을 나타내는 모식도
【설 명】
1) 인간피부의 압력인지 원리(그림2_상) :
인간을 포함한 포유류 피부에 존재하는 메르켈 세포 내 존재하는 Piezo2 단백질은 대표적인 생체이온이 이동하는 채널로써 평상시에는 닫혀 있지만, 기계적인 자극이 발생 시 ‘점-유탄성’원리에 의해 열리게 되어서 이온이 이동하게 된다. 이러한 이온의 흐름은 전기적인 신호를 발생시켜 뇌에 전달되어 외부 압력을 인지하게 되는 원리이다.
2) 생체 모사형 전자피부의 압력인지 원리(그림2_하) :
본 연구에서 개발한 전자피부의 경우, 메르켈 세포에 존재하는 Piezo2 단백질과 동일하게 기계적인 자극이 발생 시 폴리우레탄 고분자의 변형에 의한 ‘점-유탄성’원리로 이온성 액체가 이동하여 전기적 신호의 변화를 유도하여 외부 압력을 인지하게 된다.
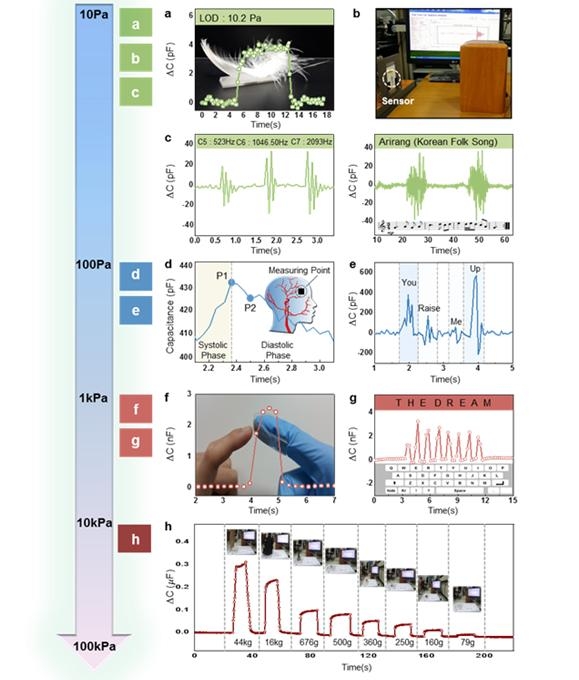
그림 3. 포유류 촉각원리를 구현한 초고감도 전자피부의 넓은 압력범위(Pa~MPa)에서의 응답성
【설 명】
a) 기체 흐름 수준의 압력(Pa) 인지 평가
b, c) 소리파동(수십Pa)에 대한 인지능력 평가
d) 혈압(수백Pa)에 대한 인지능력 평가
e) 인공성대로서의 성대 진동(수백Pa) 인지능력 평가
f, g) 생활압력(수십kPa) 인지능력 평가
h) 물체의 하중(수백kPa∼MPa) 인지능력 평가


